Posture Monitoring Method of Scraper Conveyor Based on Adaptive Extended Kalman Filter
ID:18
View Protection:PUBLIC
Updated Time:2022-12-19 14:54:31
Hits:1064
Poster Presentation
Start Time:Pending (Asia/Shanghai)
Duration:Pending
Session:[No Session] » [No Session Block]
No files
Abstract
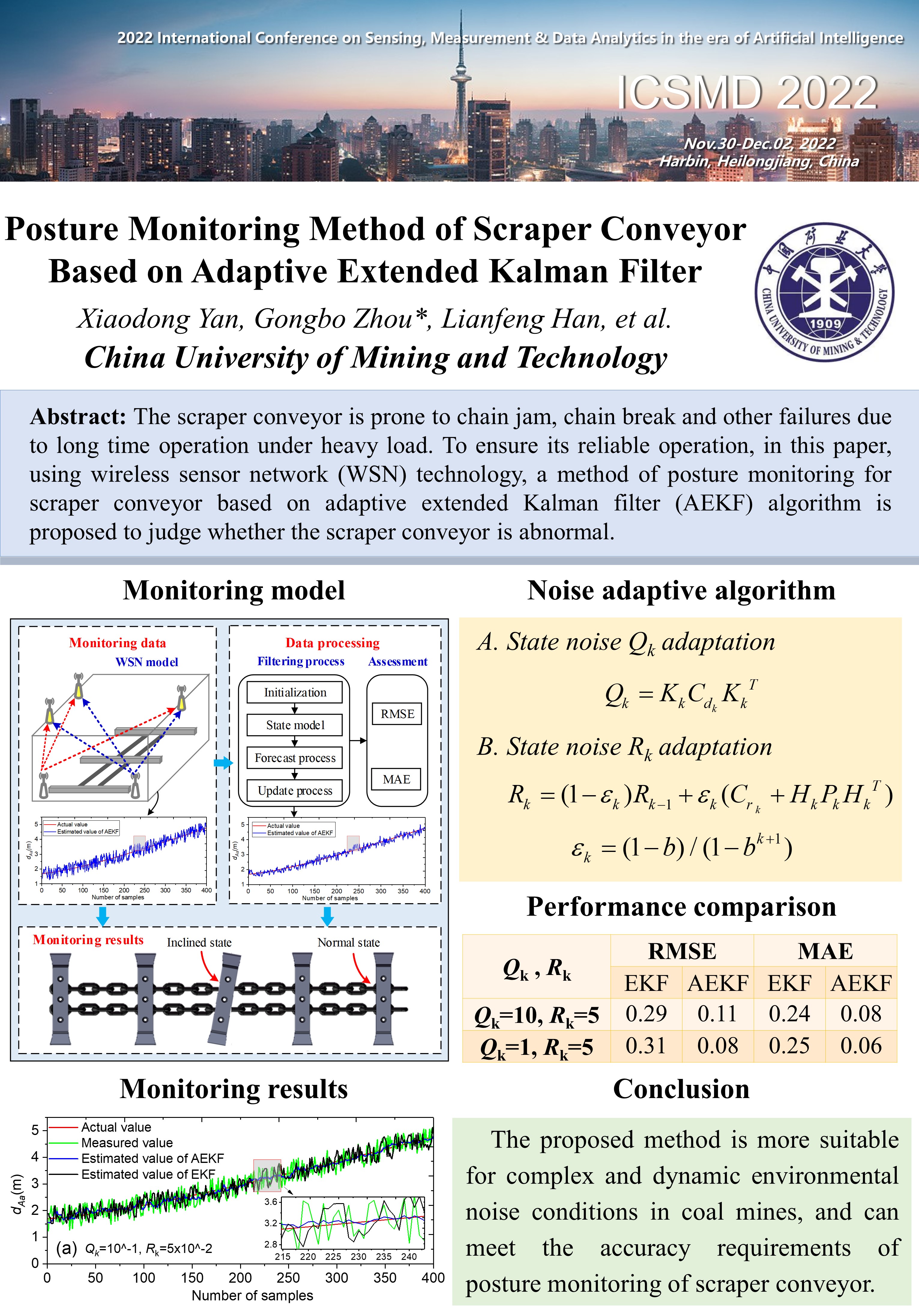
The scraper conveyor is prone to chain jam, chain break and other failures due to long time operation under heavy load. To ensure its reliable operation, in this paper, using wireless sensor network (WSN) technology, a method of posture monitoring for scraper conveyor based on adaptive extended Kalman filter (AEKF) algorithm is proposed to judge whether the scraper conveyor is abnormal. Firstly, the posture monitoring model of scraper conveyor is established, and then an AEKF algorithm is designed. Finally, the performance of the proposed algorithm is verified by simulation. The results show that compared with the traditional extended Kalman filter (EKF) algorithm, the proposed AEKF algorithm is more stable in filtering performance under different environmental noises, and RMSE and MAE are kept below 0.11, which further proves that the proposed method is more suitable for the complex environmental noise conditions with dynamic changes in coal mines, and can meet the accuracy requirements for posture monitoring of scraper conveyors.
Keywords
scraper conveyor, WSN, EKF, AEKF, posture
Speaker

Xiaodong Yan
China University of Mining and TechnologyAll comments
15th August 2022 25th September 2022 - Manuscript Submission
15th October 2022 - Acceptance Notification
1st November 2022 - Camera Ready Submission
1st November 2022 10th November 2022 - Early Bird Registration
Contact Us
Website: https://icsmd2022.aconf.org
Secretary: icsmd2022@163.com
Scan the QR code and join the
WeChat Group
Comment submit