Multi-task unmanned swarm control method based on dynamic optimal path planning
ID:10
View Protection:PUBLIC
Updated Time:2022-12-18 10:53:46
Hits:1011
Poster Presentation
Start Time:Pending (Asia/Shanghai)
Duration:Pending
Session:[No Session] » [No Session Block]
Abstract
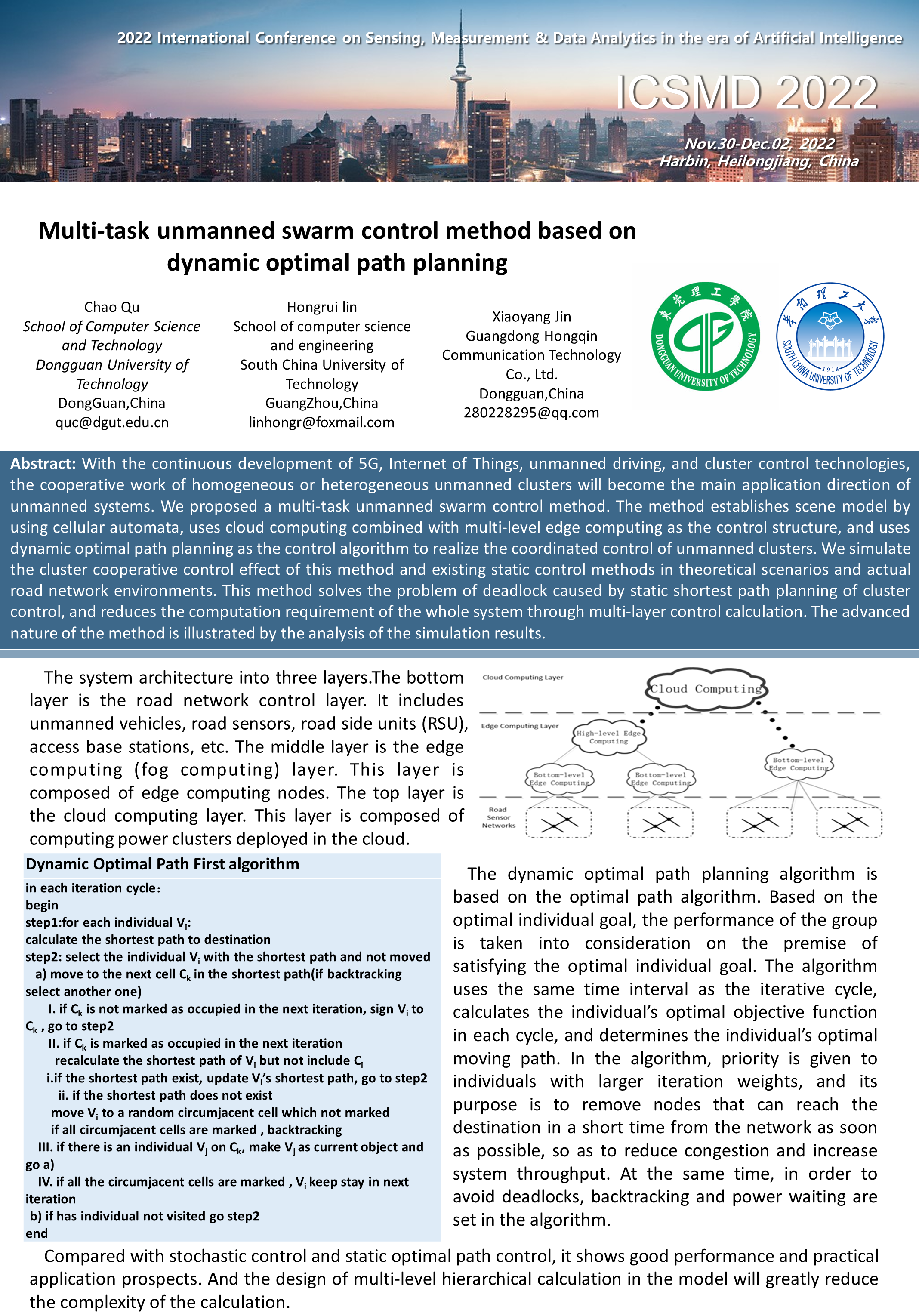
With the continuous development of 5G, Internet of Things, unmanned driving, and cluster control technologies, the cooperative work of homogeneous or heterogeneous unmanned clusters will become the main application direction of unmanned systems. We proposed a multi-task unmanned swarm control method. The method establishes scene model by using cellular automata, uses cloud computing combined with multi-level edge computing as the control structure, and uses dynamic optimal path planning as the control algorithm to realize the coordinated control of unmanned clusters. We simulate the cluster cooperative control effect of this method and existing static control methods in theoretical scenarios and actual road network environments. This method solves the problem of deadlock caused by static shortest path planning of cluster control, and reduces the computation requirement of the whole system through multi-layer control calculation. The advanced nature of the method is illustrated by the analysis of the simulation results.
Keywords
swarm control;cellular model;multi-task;dynamic path planning
Speaker
Chao Qu
Dongguan University of TechnologyDr. Chao Qu got his Bachelor degree in Computer Science from Xi’an Jiao tong University, China, in 2002 and received his Master degree in Computer Software and Theory from Sun Yat-sen University, China, in 2007. In 2017, he got his doctor degree in Computer Science from South China University of Technology, Guangzhou, China. He is an associate professor in the School of Computer Science and Network Security at Dongguan University of Technology, Dongguan, China. His research interests include computer network, data mining, semantic web and Internet of things.
All comments
15th August 2022 25th September 2022 - Manuscript Submission
15th October 2022 - Acceptance Notification
1st November 2022 - Camera Ready Submission
1st November 2022 10th November 2022 - Early Bird Registration
Contact Us
Website: https://icsmd2022.aconf.org
Secretary: icsmd2022@163.com
Scan the QR code and join the
WeChat Group
Comment submit